概要
SiNGRAY Stereo PROカメラは、Stereo STDカメラの上位機種で、2DカラーセンサとToFセンサに加え、3Dステレオカメラまで、すべてのセンサを搭載し、さらに、超高速なAIプロセッサ及び、IMUプロセッサ(9軸ジャイロ)を搭載した2D3DトリプルセンシングハイエンドAIスマートカメラ(シン・イメージング対応デバイス※1)です。ステレオ映像、カラー映像、3Dデプス映像を同時に撮像し、物体認識、ジェスチャー認識などAI画像認識及び、自己位置推をリアルタイムに処理できます。Stereo STDと同様に非常にコンパクトな一体型構成でありながら、自己位置推定技術とAI認識機能を搭載できるため、これまで不可能とされてきたあらゆるサービスの”目”としてご利用いただきます。また、Windows及び、Linuxに対応したSDKにより、簡単に撮像制御から認識処理まで構築可能で、システムからソリューションまで様々なシーンでご活用いただけます。
※1:超スマート社会に向けたモバイル性”移動性”、”携帯性”、”機動性”に優れた最新のイメージングデバイス。

特徴
- ToF解像度(H × V):640x480 最大30fps / 320x240 最大30fps
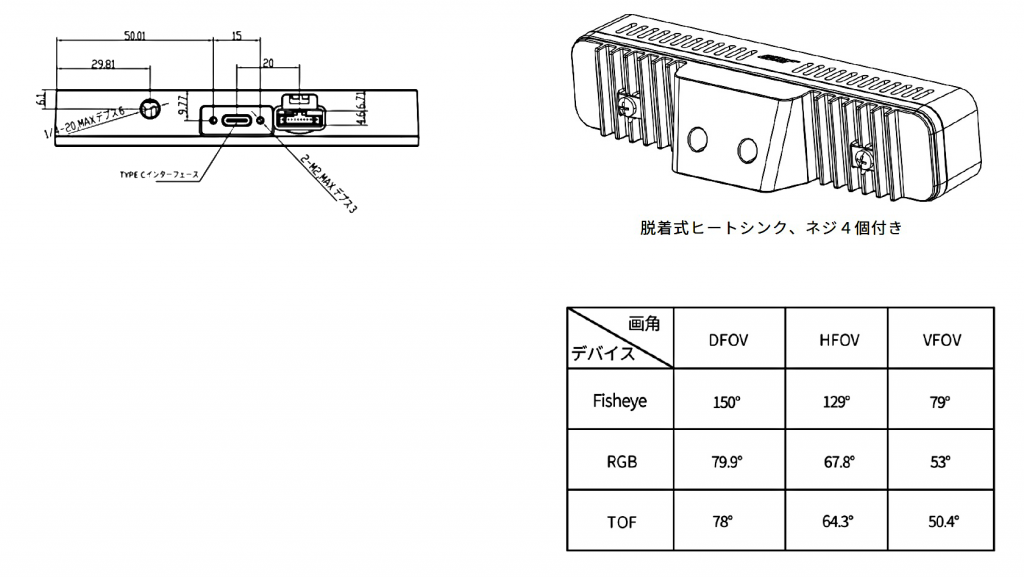
- ToFセンサFOV:78°(D)×64°(H)×50°(V)
- ToFセンサ奥行計測範囲:0.05~5.0メートル、屋内屋外対応
- ToFセンサ奥行計測精度:≤1%
- RGB解像度(H × V):1920x1080 最大30fps / 1280x720 最大30fps / 640x480 最大30fps
- RGBセンサFOV:79.9°(D) × 68°(H) × 53°(V)
- ステレオセンサ解像度:1280×800 最大50fps / 640×400 最大60fps
- ステレオセンサベースライン長:80mm
- ステレオセンサFOV:150°(D) ×130°(H) ×74°(V)
- ステレオセンサ奥行計測範囲:0.5~8.0メートル
- ステレオセンサ奥行計測精度:≤3%(0.5~3.0メートル)、≤10%(3.0~8.0メートル)
- IMU:9軸、1000Hz
- 消費電力:15W以下
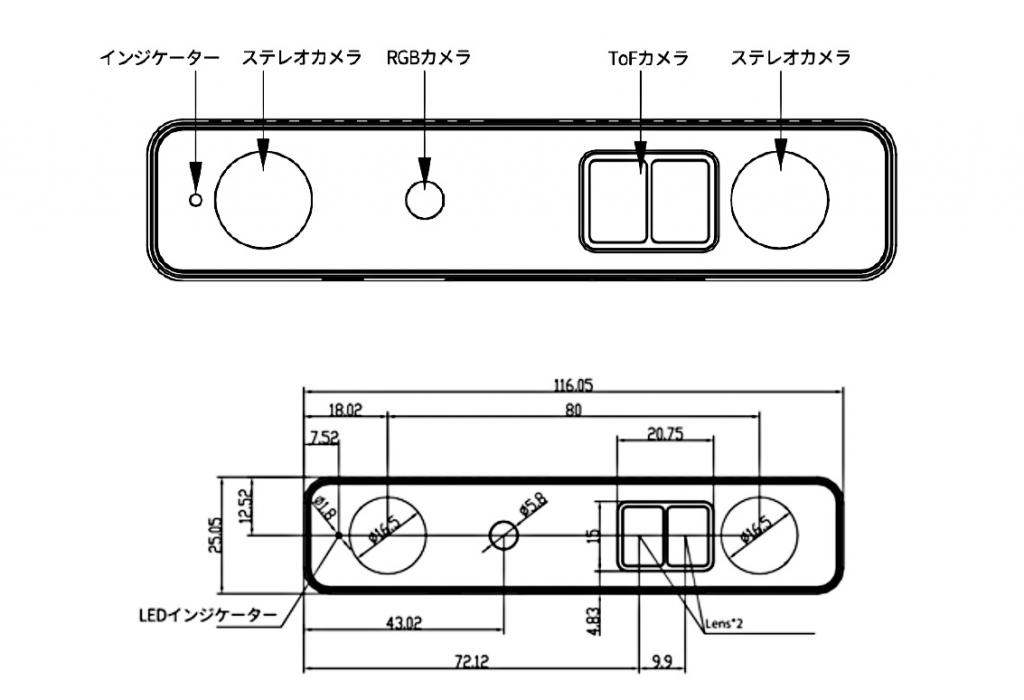
- 外形寸法・重量:116mmx25mmx18mm・127g(本体のみ、ヒートシンクなし)
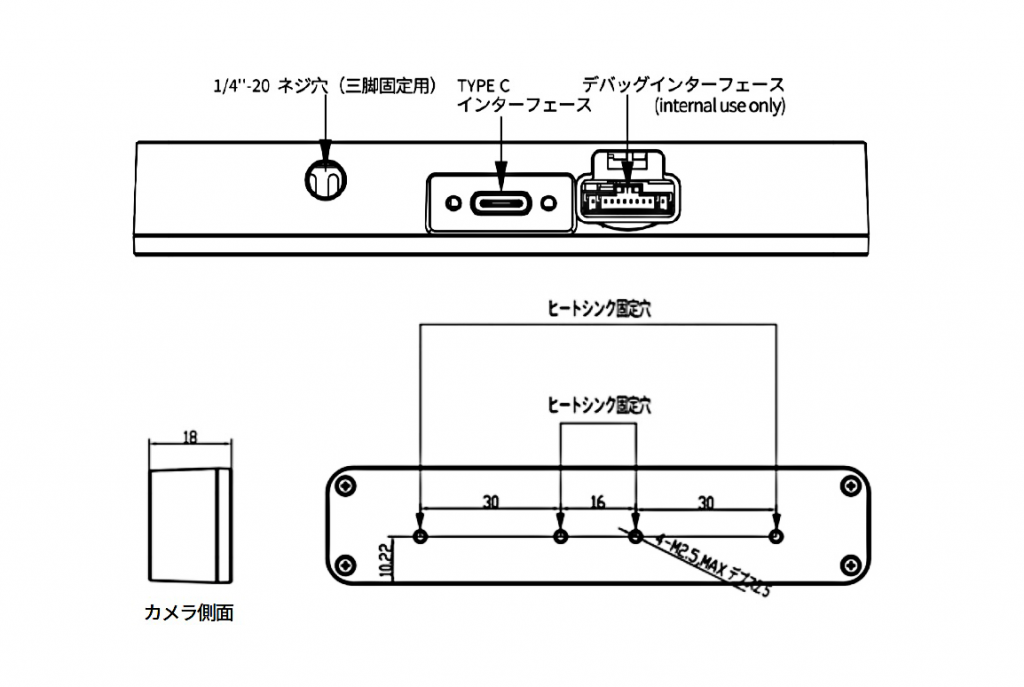
- データ出力:USB Type-Cコネクタ
- ソフトウェア
- 撮像用ツール「StereoPRO Viewer」:Windows10 、Ubuntu18.04 、 Andriod7以上対応
- 開発用ソフト「StereoPRO SDK」:Windows10 、Ubuntu16.04 / 18.04 / 20.04、ROS、Andriod7以上対応
仕様
| ToF解像度(HxV) | 640x480 最大30fps / 320x240 最大30fps |
| ToFセンサFOV | 78°(D) × 64°(H) × 50°(V) |
| ToFセンサ奥行計測範囲 | 0.05~5.0メートル、屋内屋外対応 |
| VCSEL波長 | 940nm |
| ToFセンサ奥行計測精度 | ≤1% |
| RGB解像度(HxV) | 1920x1080 最大30fps / 1280x720 最大30fps / 640x480 最大30fps |
| RGBセンサFOV | 79.9°(D) × 68°(H) × 53°(V) |
| ステレオセンサ解像度 | 1280×800 最大50fps / 640×400 最大60fps |
| ステレオセンサベースライン長 | 80mm |
| ステレオセンサFOV | 150°(D) ×130°(H) ×74°(V) |
| ステレオセンサ奥行計測範囲 | 0.5~8.0メートル |
| ステレオセンサ奥行計測精度 | ≤3%(0.5~3.0メートル)、≤10%(3.0~8.0メートル) |
| IMU | 9軸 1000Hz |
| VSLAM機能 | VIO、SLAM、CSLAM、マッピング、平面検出 |
| エッジAI機能 | 物体認識、顔認識、ジェスチャ認識、バーコード/QRコード認識など |
| 外形寸法・重量 | 116mmx25mmx18mm・127g(本体のみ、ヒートシンクなし) |
| データ出力 | USB Type-C コネクタ |
| 給電方式 | USB Type-C コネクタ経由5V 3A |
| 消費電力 | 15W以下 |
| 開発用SDKソフトウェア | Stereo PRO SDK C++/ Windows10以上、Ubuntu16.04/18.04/20.04/ROS/Andriod7以上 |
| 撮像用Viewerソフトツール | Stereo PRO Viewer Windows 10、Ubuntu18.04、Andriod7以上 |
| 動作温度 | 0~ 60℃ |
構成
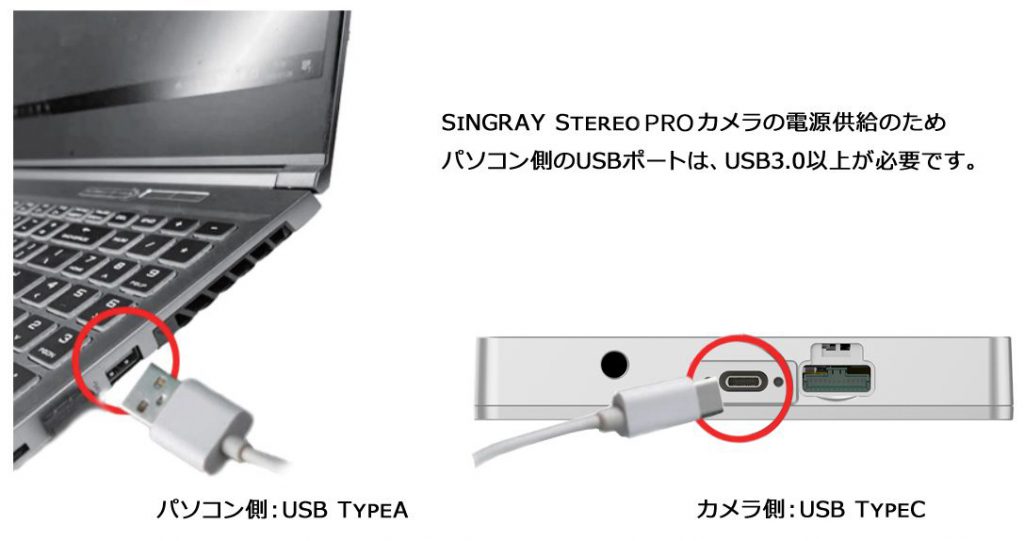
カメラ本体及びUSBケーブルまたはヒートシンクが同梱されています。
※USBケーブルは、カメラ側:TypeC パソコン側:TypeA

ソフトウェアについては、サポートサイトより最新版をダウンロードしてご利用ください。
・撮像用ツール「StereoPRO Viewer」:Windows10、Ubuntu18.04、Andriod7以上対応
・開発用ソフト「StereoPRO SDK」:Windows10以上、Ubuntu16.04/18.04/20.04、ROS、Andriod7以上対応
接続方法と動作確認
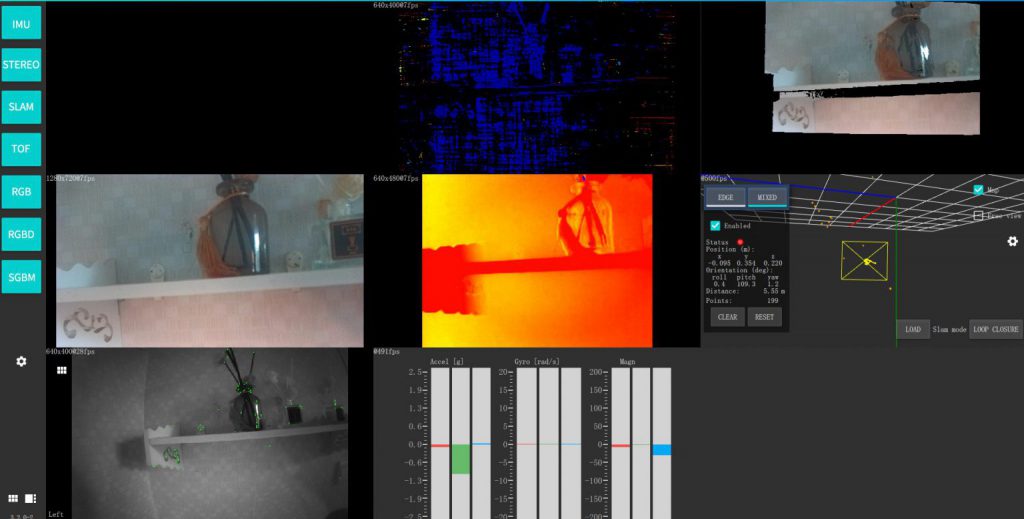
2)カメラからの映像を表示するには、撮像用Viewerツール「StereoPRO Viewer」を使用します。サポートサイトより、最新版をインストールしてご利用ください。
※Viewerのインストール方法及び、操作方法は、サポートサイトの「ユーザーマニュアル」をご参照ください。
※Windows環境の場合、Viewerを実行する前にドライバーはインストール必要です。UbuntuとAndriod環境ではドライバーインストール不要です。
● Windows環境でのドライバーインストール方法
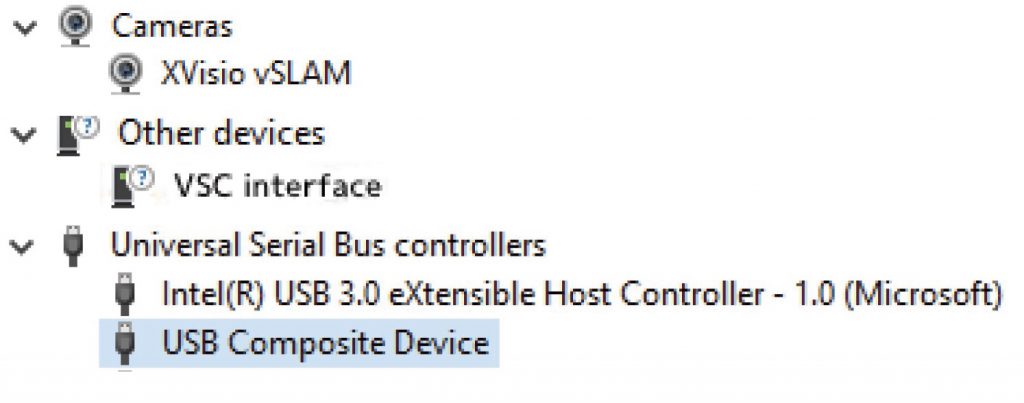
1)Windowsデバイスマネージャーを開き、カメラ接続すると、以下の3つのデバイスが見えます。
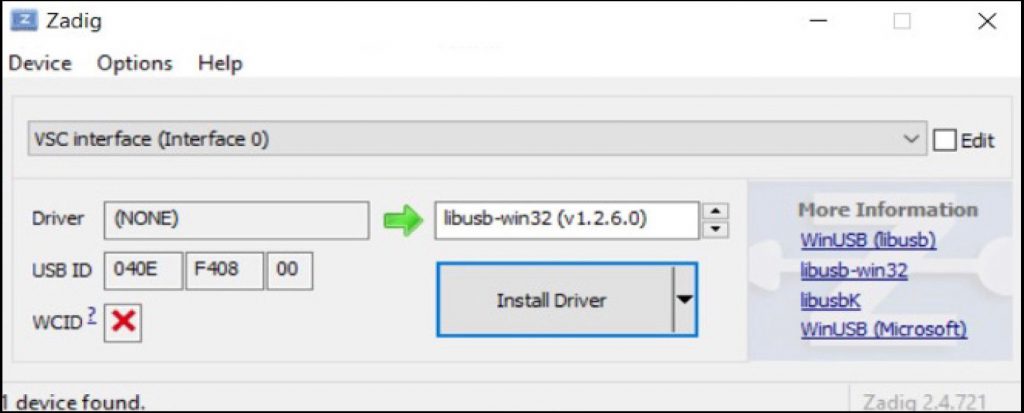
2)Zadigソフトウェアを下記のURLよりダウンロードし、実行してください。(https://zadig.akeo.ie)
3)VSC interface→libusb-32を選択し、Install Driverをクリックしてください。
4)インストール完了後、VSCインターフェースは下記のようになります。

開発方法
開発用ソフト「StereoPRO SDK」(Windows10 、Ubuntu16.04/18.04/20.04、ROS、Andriod7以上対応)をサポートサイトよりダウンロードしてご利用ください。
※インストール方法及び、プログラミング方法については、サポートサイトのSDKマニュアルをご参照ください。
ドライバー
Stereo PRO Viewer Win64_MV3.2.0-2.101_20221009のバージョンからドライバーはWindowsのViewerと同じ圧縮フォルダに入っています。
SiNGRAY Stereo PRO Viewer Win64
SiNGRAY Stereo PRO Viewer Win64を公開しました。 インストールパッケージにはWindowsプラットフォームでのViewerツールが含まれており、インストールが完了すると、カメ…
Viewer
SiNGRAY Stereo PRO Viewer Win64
SiNGRAY Stereo PRO Viewer Win64を公開しました。 インストールパッケージにはWindowsプラットフォームでのViewerツールが含まれており、インストールが完了すると、カメ…
SiNGRAY Stereo PRO Viewer SDK Ubuntu18.04、20.04-AMD
SiNGRAY Stereo PRO Viewer SDK Ubuntu18.04、20.04-AMDを公開しました。 インストールパッケージには、snapファイル、debファイルおよびViewerツールが含まれており、 [&…

SiNGRAY Stereo PRO Viewer ユーザーマニュアル
SiNGRAY Stereo PRO Viewer ユーザーマニュアルを公開しました。 本ドキュメントは、Windows、Ubuntuなどの環境でのStereo PRO Viewerのインストール、ドライバーのインス…

Windows SDKとサンプル
SiNGRAY Stereo PRO SDK Win64
SiNGRAY Stereo PRO SDK Win64を公開しました。 インストールパッケージには、Windowsプラットフォーム用の2つのバージョンの開発環境に対応したSDKとDEMOが含まれていま…
SiNGRAY Stereo PRO SDK python-wrapper
SiNGRAY Stereo PRO SDK python-wrapperを公開しました。 インストールパッケージにはpython-wrapper SDKとサンプルコードが含まれています。
SiNGRAY Stereo PRO Samples Code
本ドキュメントは主にStereo PRO SDKを使用し、サンプルコード(RGB表示、デプス表示、SLAM、Stereoなど)でPROの基本開発方法について紹介します。 Stereo PRO Samples C…
SiNGRAY Stereo PRO 開発者ガイド Windows版
SiNGRAY Stereo PRO 開発者ガイド Windows版を公開しました。 本ドキュメントはPROの製品特長、各カメラモジュールの説明およびWindows環境でのSDKの展開・配置の流れにつ…
Ubuntu SDKとサンプル
SiNGRAY Stereo PRO SDK Ubuntu18.04-ARM
SiNGRAY Stereo PRO SDK Ubuntu18.04-ARMを公開しました。 *ARMではViewerは対応していません。
SiNGRAY Stereo PRO Viewer SDK Ubuntu18.04、20.04-AMD
SiNGRAY Stereo PRO Viewer SDK Ubuntu18.04、20.04-AMDを公開しました。 インストールパッケージには、snapファイル、debファイルおよびViewerツールが含まれており、 [&…
SiNGRAY Stereo PRO SDK python-wrapper
SiNGRAY Stereo PRO SDK python-wrapperを公開しました。 インストールパッケージにはpython-wrapper SDKとサンプルコードが含まれています。
SiNGRAY Stereo PRO Samples Code
本ドキュメントは主にStereo PRO SDKを使用し、サンプルコード(RGB表示、デプス表示、SLAM、Stereoなど)でPROの基本開発方法について紹介します。 Stereo PRO Samples C…
SiNGRAY Stereo PRO 開発者ガイドUbuntu版
SiNGRAY Stereo PRO 開発者ガイド Ubuntu版を公開しました。 本ドキュメントはPROの製品特長、各カメラモジュールの説明およびUbuntu環境でのSDKの展開・配置の流れについ…
ドキュメント
SiNGRAY Stereo PRO 仕様書
SiNGRAY Stereo PRO 仕様書を公開しました。 本ドキュメントはStereo PROの仕様と外観寸法図について説明しています。
SiNGRAY Stereo PRO 取扱説明書
SiNGRAY Stereo PRO 取扱説明書を公開しました。 本ドキュメントは製品使用上の注意事項と初期設定について説明しています。